Implement Open Source Standard Enrich Open Source Ecosystem
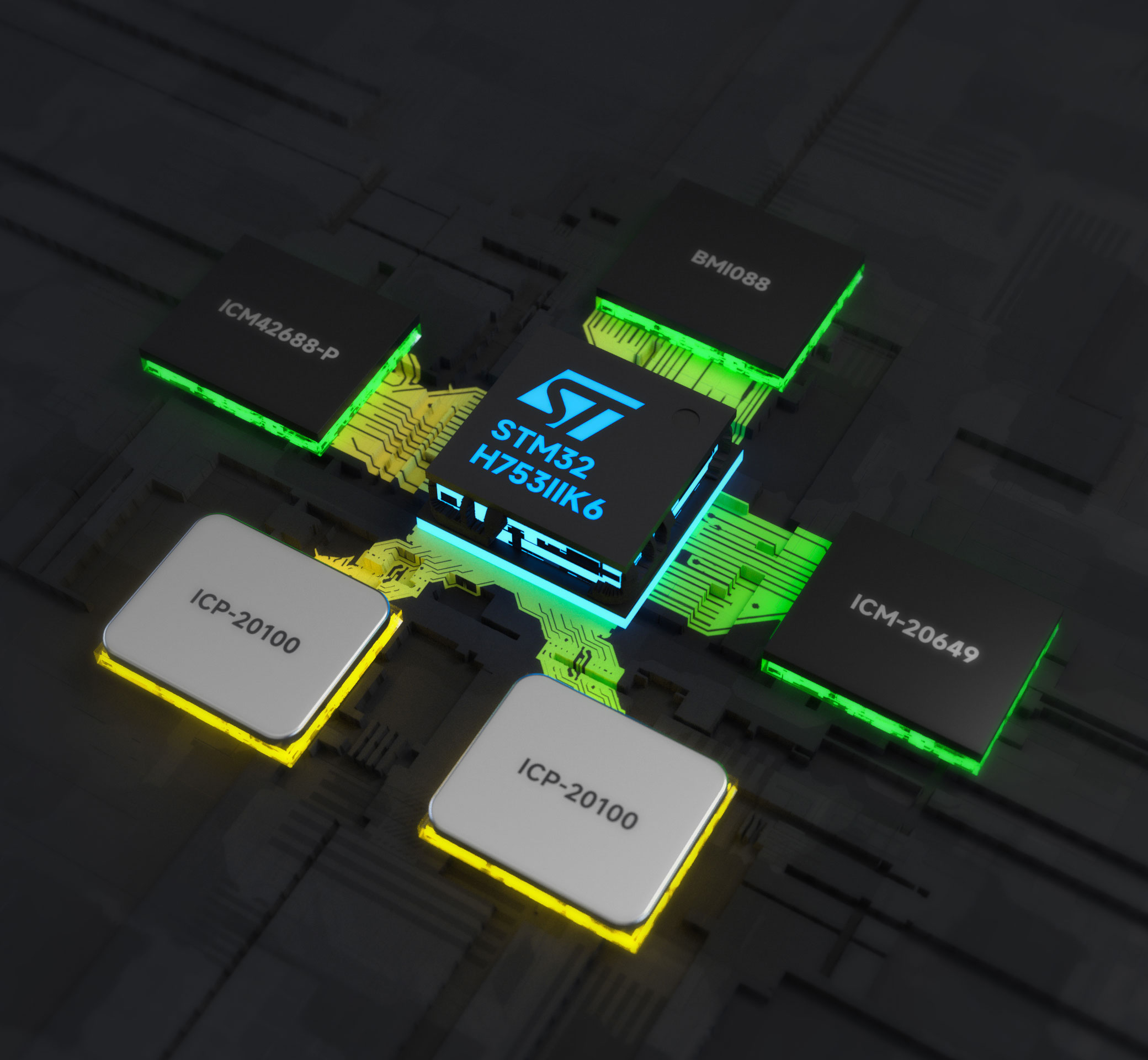
H7 Double Precision Floating-Point Arithmetic Unit Processor
Using STM32H753IIK6 processor, double precision floating point arithmetic unit (DSP&FPU), the main frequency up to 480MHz; 2M FLASH,1MB RAM; For flight controller to bring powerful computing power, rapid data processing ability, for more functional development and flight stability to provide more possibilities
M3 Coprocessor to Enhance the Expansion Capacity
The high performance ARM® Cortex®-M3 coprocessor adds more security and external scalability capabilities to UAVs
Multiple Redundancy Design Ensures Flight Safety
With three redundant IMUs and two redundant barometers on separate buses, when one set of IMUs fails, the system seamlessly switches to another reliable IMU, making the flight safer
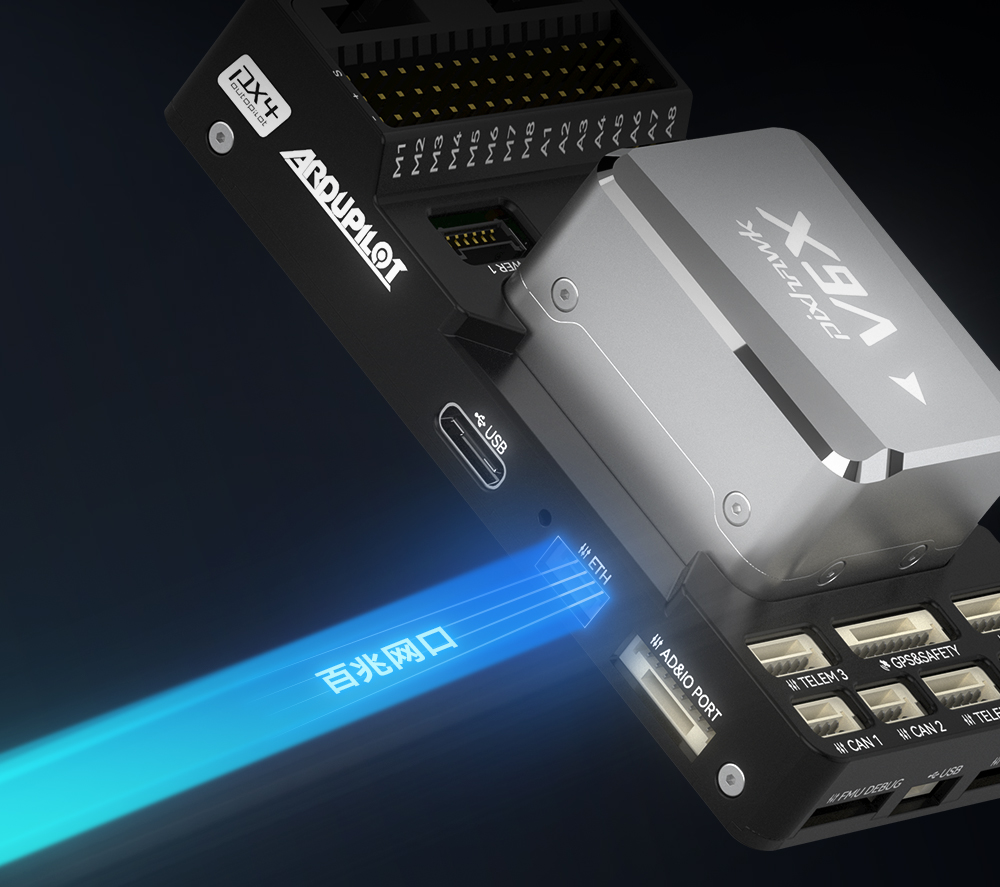
Integrated 100M Ethernet Interface
High-speed communication with task computers through Ethernet; In the future, high-end links, INS and high-end mapping cameras can be connected through Ethernet to meet the needs of high-end UAVs
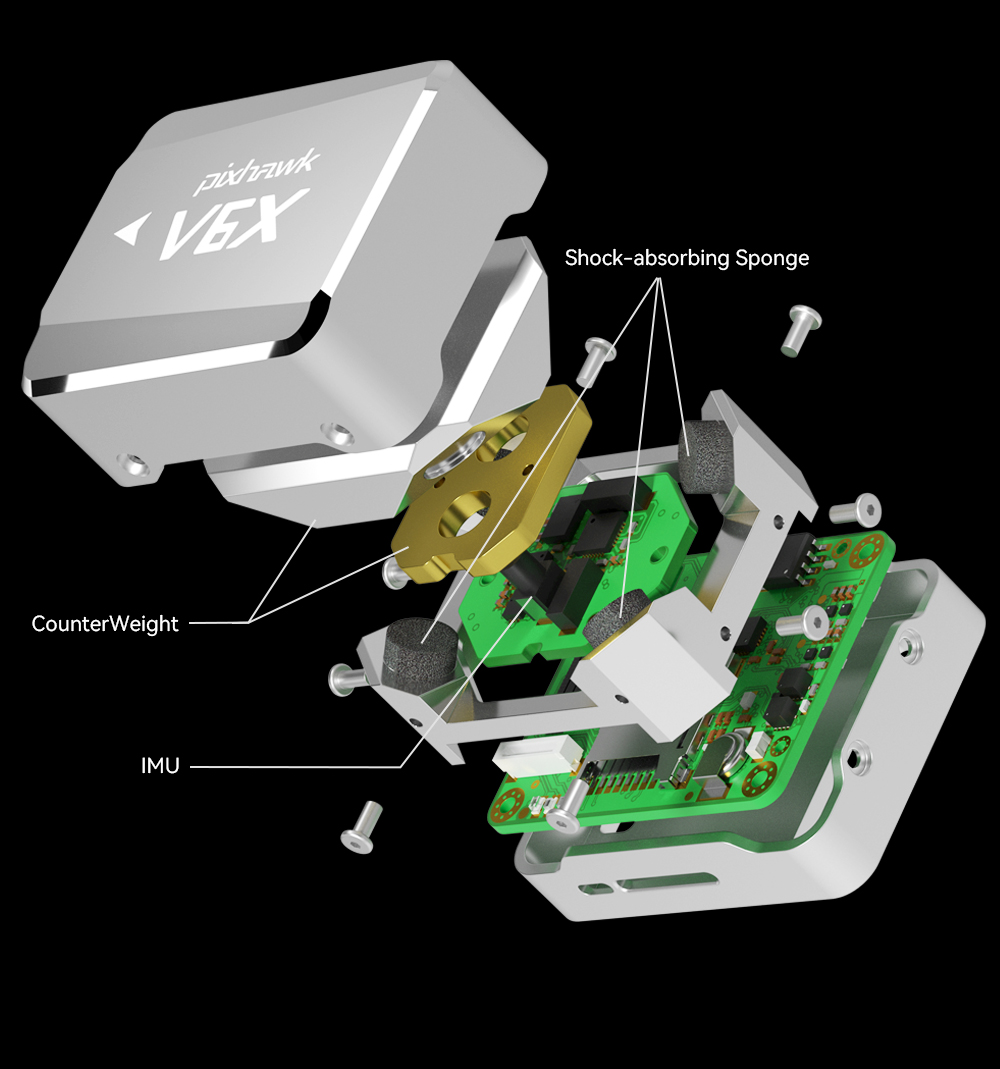
A New Generation of Patented Built-in Shock Absorber Design
The Pixhawk V6X uses a new generation of patented built-in shock absorption design to effectively filter out high-frequency vibration and ensure the accuracy of sensor data at all times
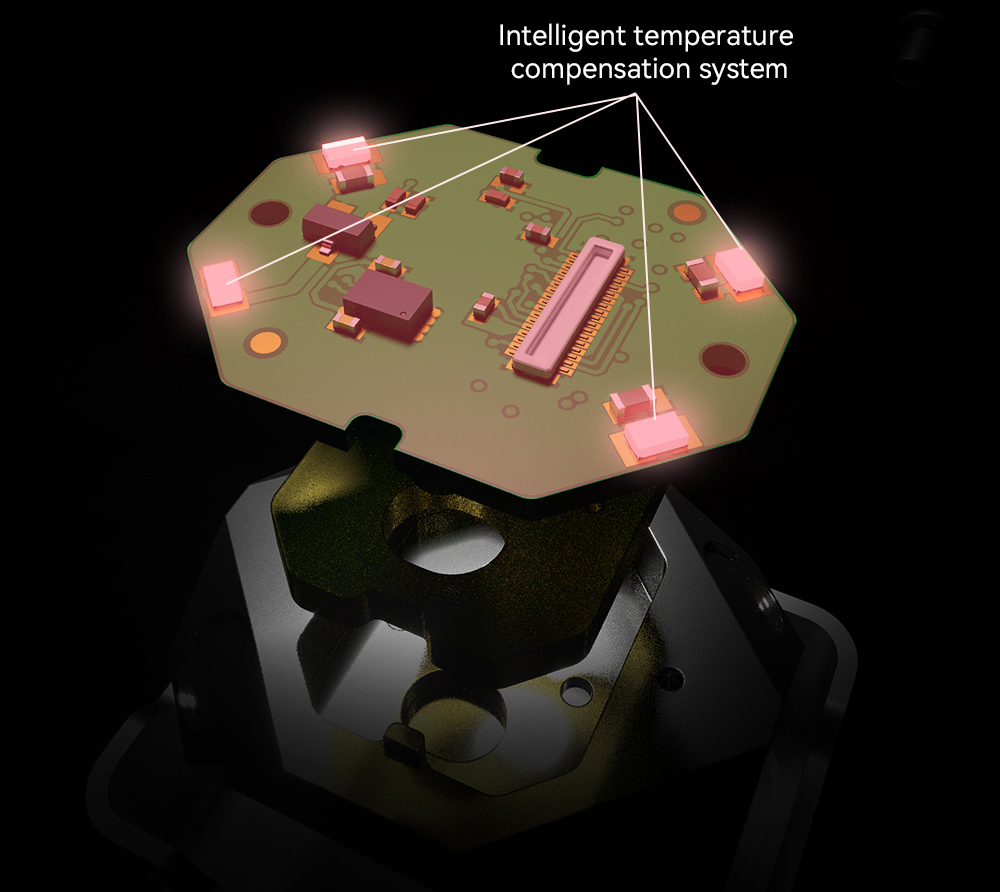
Temperature Compensation System
The built-in high-precision sensor temperature compensation system makes the sensor work at a constant temperature, ensuring that the sensor can operate stably with high precision and sensitivity in high and low temperature environments.
Adapt to More Complex Magnetic Environment
In order to adapt to the complex magnetic field environment, the RM3100 magnetic compass is selected, which supports the GPS direction finding function, and completely solves the trouble of magnetic compass interference
Pixhawk Standard Modular Design
It adopts modular design, and the core module contains the processor and all IMUs. Users can design their own baseboard according to the design reference, so as to meet the personalized customization needs
Multiple redundancy design
Multiple Redundant Power Supply Design
The V6X not only has two SMBUS dedicated power interfaces, but also supports the common Dronecan/UAVCAN power input. More choices, more security
Powe1&Power2 for SMBUS(I2C)power in, Power C1&Power C2 for Dronecan/UAVCAN power in
Nice to be able to use other batteries in field, but cautious because of the failure, I’ve decided to use only on freestyle type flying where recovery is possible, but I don’t use it over water etc because it can’t be trusted now